下载pdf格式的文档: Download
适用BSP |
BSP发布类型 |
BSP发布日期 |
BSP状态 |
|---|---|---|---|
BSP-Yocto-Ampliphy-i.MX8MP-PD24.1.0 |
大版本 |
2024-04-02 |
已发布 |
BSP-Yocto-Ampliphy-i.MX8MP-PD24.1.1 |
小更新 |
2024-04-09 |
已发布 |
BSP-Yocto-Ampliphy-i.MX8MP-PD24.1.2 |
小更新 |
2024-06-26 |
已发布 |
BSP-Yocto-NXP-i.MX8MP-PD24.1.0 |
大版本 |
2024-11-07 |
已发布 |
BSP-Yocto-NXP-i.MX93-PD24.2.0 |
大版本 |
2024-10-08 |
已发布 |
BSP-Yocto-Ampliphy-i.MX6UL-PD24.1.0 |
大版本 |
2024-07-19 |
已发布 |
BSP-Yocto-Ampliphy-AM62Ax-PD24.1.0 |
大版本 |
2024-06-27 |
已发布 |
BSP-Yocto-Ampliphy-AM62x-PD24.1.0 |
大版本 |
2024-06-27 |
已发布 |
BSP-Yocto-Ampliphy-AM64x-PD24.1.0 |
大版本 |
2024-06-27 |
已发布 |
本手册适用Yocto版本 Scarthgap
1. 简介
PHYTEC 的 Yocto 发行版 Ampliphy(前身是Yogurt)支持 RAUC 机制。RAUC管理设备的固件升级过程,包括升级kernel,设备树和根文件系统。对emmc设备而言,它也包括升级bootloader。
本手册描述了如何在PHYTEC平台上实现以及使用RAUC机制。需要注意的是,不同核心板使用不同的bootloader和烧写存储设备,这导致了不同平台RAUC处理过程的差异性。请确保阅读对应硬件平台的本手册相关部分。
备注
本手册使用了一些特定machine的路径和变量。请在执行任何命令之前确保您使用了正确的machine和设备名称
2. 系统配置
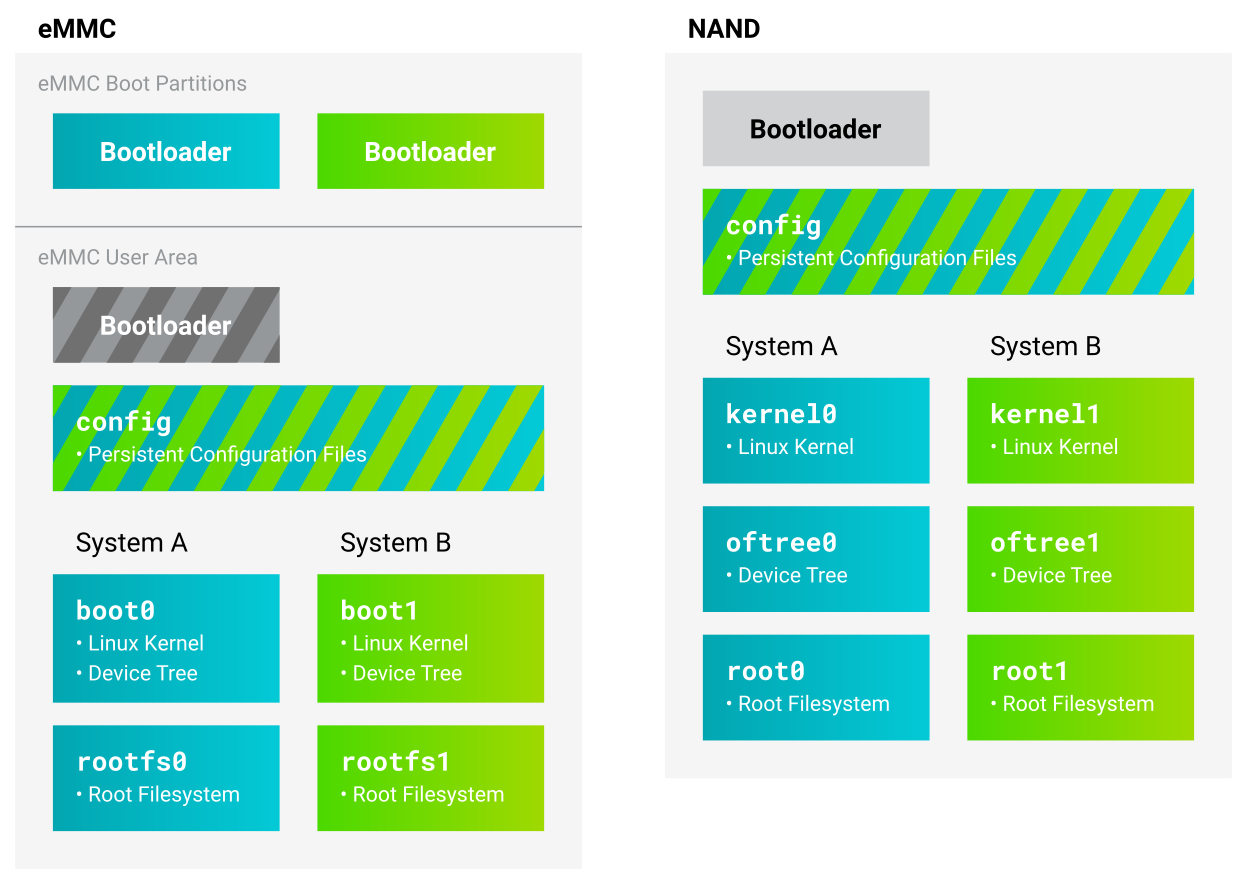
RAUC机制可以用在eMMC和NAND flash 存储的设备上,使用distro ampliphy-rauc 或者 ampliphy-vendor-rauc, 这两个distro上 RAUC机制默认被使能,无需额外配置。RAUC可以应用在不同的升级场景下。例如: 我们需要BSP去实现系统镜像的A/B备份(包括eMMC上的bootloader)。请注意:RAUC会产生一个config分区存储永久性的配置数据,这些数据不会被系统升级所覆盖
2.1. RAUC配置范例
The partition layout is defined in the /etc/rauc/system.conf file. As an
example, this is what it looks like for i.MX 8M Plus with eMMC flash storage:
[system]
compatible=phyboard-pollux-imx8mp-3
bootloader=uboot
mountprefix=/mnt/rauc
data-directory=/mnt/config/rauc/
[handlers]
pre-install=/usr/lib/rauc/rauc-pre-install.sh
post-install=/usr/lib/rauc/rauc-post-install.sh
[keyring]
path=mainca-rsa.crt.pem
# Bootloader
[slot.bootloader.0]
device=/dev/mmcblk2
type=boot-emmc
# System A
[slot.rootfs.0]
device=/dev/mmcblk2p5
type=ext4
bootname=system0
resize=true
[slot.boot.0]
device=/dev/mmcblk2p1
type=vfat
parent=rootfs.0
# System B
[slot.rootfs.1]
device=/dev/mmcblk2p6
type=ext4
bootname=system1
resize=true
[slot.boot.1]
device=/dev/mmcblk2p2
type=vfat
parent=rootfs.1
请注意,slots中device随不同的machine配置而有所不同
警告
Updates with RAUC use an OpenSSL certificate to verify the validity of an image. The BSP includes a certificate that can be used for development. In a productive system, however, it is highly recommended to use a self-created key and certificate. If you need to change the keyring on an existing device, see 切换RAUC密钥 for more information.
3. 设计注意事项
为了避免系统被锁住,建议您使用一个硬件看门狗。如果kernel 不启动或者是系统发生了其他灾难性的事件导致系统无法正常运行,硬件看门狗可以重启系统。默认情况下,看门狗是不使能的。如果需要使能硬件看门狗,请参考对应核心板适用的BSP参考手册。
其他重要的设计注意事项以及checklist,可以在官方RAUC文档: https://rauc.readthedocs.io/en/latest/checklist.html 中找到。
4. 初始设置
为了使用RAUC,烧写设备需要烧写入完整的Linux系统和bootloader。推荐使用烧写工具: partup.
4.1. 烧写存储
要给设备烧写正确的分区/卷,请使用 ampliphy-rauc 或者 ampliphy-vendor-rauc 发行版编译出的partup包。您可以直接使用BSP release中预编译的partup包,也可以使用Yocto自主编译。修改 local.conf 文件去修改Distro,这样不同的distro,会产生不同的build文件夹,存储编译过程中生成的对应软件包和镜像。使用OE init脚本初始化build目录:
host:~$ source sources/poky/oe-init-build-env
把distro 变量配置为 ampliphy-rauc (i.MX6, AM6x,i.MX8 mainline BSP) 或者 ampliphy-vendor-rauc (i.MX8,i.MX9 vendor BSP):
DISTRO ?= "ampliphy-rauc"
使用该distro编译出的任何镜像都包含一个完整的A/B系统,按如下方法编译镜像:
host:~$ bitbake phytec-headless-image
生成的partup包存储在 deploy-ampliphy-vendor-rauc 目录下,例如:
deploy-ampliphy-vendor-rauc/images/phyboard-segin-imx93-2/phytec-headless-image-phyboard-segin-imx93-2.partup
该partup包包含烧写eMMC所必须的所有数据和配置。 Partup 可以从它的 发布页面 获取。查看其中的README文件以获取详细的 安装指导。 Partup工具已经安装在我们的Ampliphy镜像中,例如 phytec-headless-image ,我们可以直接使用它。
备注
要烧写初始的RAUC系统,需要先在另外一个烧写设备上烧写并启动一个非RAUC系统。例如,你可以从SD卡启动一个常规的 ampliphy 发行版的 phytec-headless-image 镜像。
4.1.1. eMMC
在目标设备上,从SD卡启动非RAUC系统后,拷贝使用distro ampliphy-rauc 或者 ampliphy-vendor-rauc 编译出的 .partup 包到运行系统上:
host:~$ scp phytec-headless-image-phyboard-segin-imx93-2.partup 192.168.3.11:/root
然后将partup包安装到eMMC中:
target:~$ partup install phytec-headless-image-phyboard-segin-imx93-2.partup /dev/mmcblk0
现在目标设备可以启动烧写好的A/B系统了
4.1.2. NAND
备注
在之前的barebox中提供了一些脚本去初始化NAND flash上的A/B双系统: rauc_init_nand, rauc_flash_nand_from_tftp 和 rauc_flash_nand_from_mmc。这些脚本已经被弃用。当前建议使用 Ampliphy 发行系统中,Linux环境下的 rauc-flash-nand 脚本
在裸NAND flash上,kernel,设备树和根文件系统分别单独被烧写进flash上。在目标设备的Linux环境下初始化NAND flash以创建正确的卷:
target:~$ rauc-flash-nand -k /path/to/zImage -d /path/to/oftree -r /path/to/root.ubifs
初始化脚本自动使用NAND flash上所有可用空间。NAND 设备也会通过在/proc/mtd路径下查找root设备来确定。
在i.MX6 和 i.MX6UL设备上,使用bbu (barebox update) 去烧写bootloader
target:~$ bbu.sh -f /path/to/barebox.bin
A/B 备份系统现在可以从NAND Flash启动了
4.2. Bootloader
4.2.1. 默认启动A/B 系统
自Yocto版本 hardknott 后,启动A/B系统的工作大部分由bootloader自动完成。配备eMMC 烧写的设备,在BSP编译过程中,相关设置会被写入bootloader环境变量中。具体来说,如果使用了发行版 ampliphy-rauc 或者 ampliphy-vendor-rauc 系统(如前所述),bootloader会自动启动A/B系统并且设置相应的环境变量。
自动设定的过程也可以通过在bootloader中设置一个变量来实现手动设定。该过程在随后的U-boot、barebox章节中会被详细描述。
4.2.2. U-Boot
在成功启动进入Linux环境后,可以使用下面的命令来查看可用参数:
target:~$ fw_printenv
我们将看到该参数和其他参数一起出现在控制台输出中:
doraucboot=1
为了手动使能/关闭带RAUC机制A/B系统的自启动,将该变量设置为 0 或者 1:
target:~$ fw_setenv doraucboot 1
该参数也可以在U-boot中被修改。重启设备,按任意键停止自动启动,进入bootloader环境。查看bootloader环境变量。
u-boot=> printenv
并且设置它们:
u-boot=> setenv doraucboot 1
u-boot=> saveenv
4.2.3. Barebox
在barebox中,可以通过名称选定要启动的系统。要启动A/B系统,包括RAUC,需要使用 bootchooser 。例如:要从SD卡启动不带RAUC的系统,使用 mmc ,如果是NAND设备,使用 nand :
barebox$ nv boot.default=bootchooser
5. 创建RAUC升级包
要升级带RAUC的系统,需要创建RAUC升级包 (.raucb) 。它包含所有升级必要的脚本和镜像,以及一个RAUC manifest.raucm 文件描述RAUC升级包的内容。BSP中包含了可以生成RAUC 升级包的recipe。
要使用Yocto创建RAUC 升级包,在distro ampliphy-rauc or ampliphy-vendor-rauc 初始化的build目录下执行下列命令:
host:~$ bitbake phytec-headless-bundle
This results in the creation of a .raucb bundle file in
deploy/images/<MACHINE>/ which can be used for updating the system as
described later. There is no need to create a manifest.raucm manually, as it
is created automatically during the build of the bundle. As a reference, the
created manifest would look something like this:
[update]
compatible=phyboard-polis-imx8mm-3
version=r0
description=PHYTEC rauc bundle based on BSP-Yocto-FSL-i.MX8MM-PD20.1.0
build=20200624074335
[image.rootfs]
sha256=cc3f65cd1c1993951d7a39bdb7b7d723617ac46460f8b640cd8d1622ad6e4c17
size=99942000
filename=phytec-headless-image-phyboard-polis-imx8mm-3.tar.gz
[image.boot]
sha256=bafe46679af8c6292dba22b9d402e3119ef78c6f8b458bcb6993326060de3aa4
size=12410534
filename=boot.tar.gz.img
关于manifest格式的更多信息,请参考 https://rauc.readthedocs.io/en/latest/reference.html#manifest。
5.1. 创建版本迁移升级包
升级到新的大版本需要特定的RAUC升级包
When updating to a Scarthgap based release from an older version, add the
following to your local.conf of the new release and rebuild the RAUC bundle:
RAUC_IMAGE_FSTYPE = "tar.gz"
RAUC_SLOT_rootfs[adaptive] = ""
After successfully migrating your system with the rebuilt bundle, revert these settings for any further bundle updates.
6. RAUC升级
要使用RAUC升级系统,上述过程中生成RAUC 升级包需要先被拷贝到核心板内存,或者在Linux中挂载的存储设备上。拷贝文件的一种方式是使用 scp ,它要求核心板文件系统中有足够的剩余空间。首先启动设备到Linux环境,然后通过以太网连接到host PC.
在主机上运行:
host:~$ scp phytec-headless-bundle-phyboard-polis-imx8mm-3.raucb root@192.168.3.11:/tmp/
在设备上,rauc升级包可以被读取:
target:~$ rauc info /tmp/phytec-headless-bundle-phyboard-polis-imx8mm-3.raucb
输出会类似于:
rauc-Message: 12:52:49.821: Reading bundle: /phytec-headless-bundle-phyboard-polis-imx8mm-3.raucb
rauc-Message: 12:52:49.830: Verifying bundle...
Compatible: 'phyboard-polis-imx8mm-3'
Version: 'r0'
Description: 'PHYTEC rauc bundle based on BSP-Yocto-FSL-i.MX8MM-PD20.1.0'
Build: '20200624073212'
Hooks: ''
2 Images:
(1) phytec-headless-image-phyboard-polis-imx8mm-3.tar.gz
Slotclass: rootfs
Checksum: 342f67f7678d7af3f77710e1b68979f638c7f4d20393f6ffd0c36beff2789070
Size: 180407809
Hooks:
(2) boot.tar.gz.img
Slotclass: boot
Checksum: 8c84465b4715cc142eca2785fea09804bd970755142c9ff57e08c791e2b71f28
Size: 12411786
Hooks:
0 Files
Certificate Chain:
0 Subject: /O=PHYTEC Messtechnik GmbH/CN=PHYTEC Messtechnik GmbH Development-1
Issuer: /O=PHYTEC Messtechnik GmbH/CN=PHYTEC Messtechnik GmbH PHYTEC BSP CA Development
SPKI sha256: E2:47:5F:32:05:37:04:D4:8C:48:8D:A6:74:A8:21:2E:97:41:EE:88:74:B5:F4:65:75:97:76:1D:FF:1D:7B:EE
Not Before: Jan 1 00:00:00 1970 GMT
Not After: Dec 31 23:59:59 9999 GMT
1 Subject: /O=PHYTEC Messtechnik GmbH/CN=PHYTEC Messtechnik GmbH PHYTEC BSP CA Development
Issuer: /O=PHYTEC Messtechnik GmbH/CN=PHYTEC Messtechnik GmbH PHYTEC BSP CA Development
SPKI sha256: AB:5C:DB:C6:0A:ED:A4:48:B9:40:AC:B1:48:06:AA:BA:92:09:83:8C:DC:6F:E1:5F:B6:FB:0C:39:3C:3B:E6:A2
Not Before: Jan 1 00:00:00 1970 GMT
Not After: Dec 31 23:59:59 9999 GMT
要检查系统的当前状态,运行:
target:~$ rauc status
得到类似如下输出:
=== System Info ===
Compatible: phyboard-segin-imx6ul-6
Variant:
Booted from: rootfs.0 (system0)
=== Bootloader ===
Activated: rootfs.0 (system0)
=== Slot States ===
o [rootfs.1] (/dev/ubi0_6, ubifs, inactive)
bootname: system1
boot status: good
[dtb.1] (/dev/ubi0_3, ubivol, inactive)
[kernel.1] (/dev/ubi0_2, ubivol, inactive)
x [rootfs.0] (/dev/ubi0_5, ubifs, booted)
bootname: system0
boot status: good
[kernel.0] (/dev/ubi0_0, ubivol, active)
[dtb.0] (/dev/ubi0_1, ubivol, active)
要使用下载的升级包升级当前系统,运行:
target:~$ rauc install /tmp/phytec-headless-bundle-phyboard-polis-imx8mm-3.raucb
然后重启:
target:~$ reboot
如果升级成功,RAUC会自动切换到新升级的系统。在重启过程中,RAUC统计kernel的尝试启动次数,如果在启动次数多于系统设定值,RAUC会切换到旧系统,并且将新系统标记为bad。如果成功启动到kernel,新系统标记为good,然后使用同样的指令进行升级另外一个旧系统。在两轮成功的 rauc install and reboot 之后,两个系统都被升级了
小技巧
When you update from a USB stick, make sure to remove the stick after a successful update before rebooting. If not, an automatic update will be started after each boot. This is due to the 使用RAUC从USB Flash自动升级 you can find below.
6.1. 修改优先的启动Slot
我们可以手动切换优先系统:
target:~$ rauc status mark-active other
重启后,设备会从另外一个系统启动。
7. 切换RAUC密钥
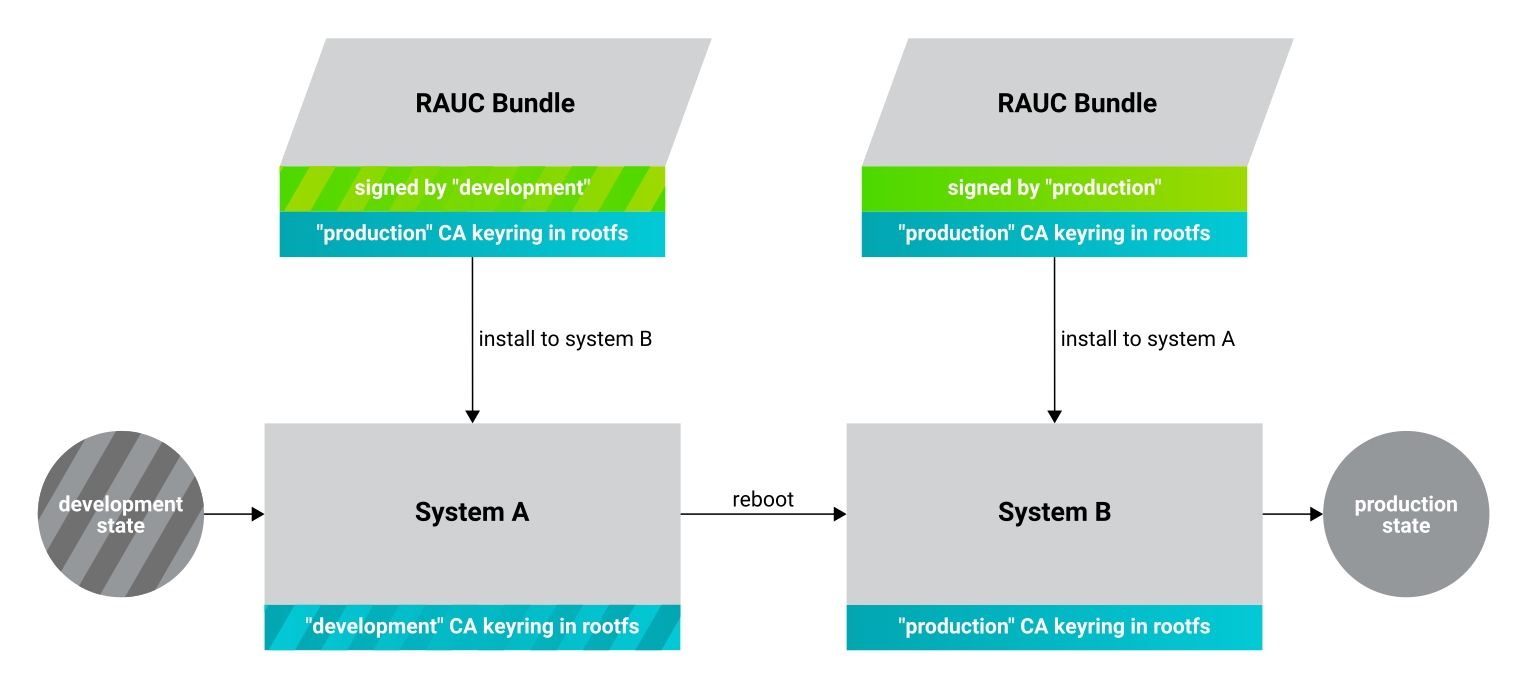
PHYTEC的发行版包含只用于开发阶段和演示用途的密钥和证书。要在设备发布后更新到新的PKI,RAUC的密钥必须要修改。本章描述从开发到量产的完整处理流程。必须要记住,发布您的产品设备时使用新的量产密钥永远比过度依赖开发阶段的旧密钥要安全的多。下图展示了切换RAUC密钥的通用处理过程:
7.1. 密钥切换
给您自己的PKI创建新的证书和密钥。请查阅我们的安全手册,里面详细描述了如何创建一个自定义PKI。在本手册中,我们把这个新创建的PKI定义为 "量产",以和现存的 "开发"密钥区别开来。
将生成的密钥和证书放到Yocto 工程根目录下,和 build/ 以及 sources/ 目录同一级。
警告
存储私钥的时候必须要十分小心!千万不要泄露。例如:不要将私钥存储在公共git仓库。否则,一些未授权的组织或者个人可能会用这写密钥创建出可以在您的设备上安装并启动的RAUC升级包!
Now, a RAUC bundle must be created that contains the new "production" CA keyring
in its root filesystem but is still signed by the "development" CA. With this,
the system is converted from a "development" system to a "production" system. To
achieve this, exchange the file mainca-rsa.cert.pem installed by the RAUC
recipe in the Yocto sources. Create a file rauc-conf.bbappend in your own
Yocto layer:
FILESEXTRAPATHS_prepend := "${THISDIR}/files:"
RAUC_KEYRING_FILE = "${CERT_PATH}/rauc-customer/mainca-rsa.cert.pem"
然后像之前一样编译出RAUC升级包,只是这一次我们使用了替换的密钥:
host:~$ source source/poky/oe-init-build-env
host:~$ bitbake phytec-headless-bundle # Build the desired RAUC bundle
安装生成的RAUC升级包。目标设备现在已经将包含有"量产"密钥的镜像安装在与非当前运行系统的另外一个Slot中(即上图中的"System B" )。我们需要重启去启动新的系统。
所有未来给"量产"系统的RAUC升级包必须用"量产"证书所签名。在bundle recipe中将密钥和证书修改为您新生成的"量产"密钥:
require phytec-base-bundle.inc
RAUC_SLOT_rootfs ?= "phytec-headless-image"
RAUC_KEY_FILE = "${CERT_PATH}/rauc-customer/private/production-1.key.pem"
RAUC_CERT_FILE = "${CERT_PATH/rauc-customer/production-1.cert.pem"
RAUC_INTERMEDIATE_CERT_FILE = ""
重编译RAUC 升级包:
host:~$ bitbake customer-headless-bundle
现在RAUC升级包已经准备好,可以安装到您的"量产"目标系统中,并且已经完全从"开发"系统迁移。这也意味着只有使用"量产"证书签名的升级包才能被安装在您的目标设备上 (例如像"开发" 升级包将无法安装到目标设备)
8. 使用举例
8.1. 使用RAUC从USB Flash自动升级
RAUC最为人熟知的一个用例是从USB flash自动升级系统。BSP中包含了一个此用例的参考实现。我们使用标准Linux机制去配合RAUC机制。当USB插入的时候kernel通知 udev ,使用一个自定义的 udev 规则,在USB事件发生时触发systemd服务。
KERNEL!="sd[a-z][0-9]", GOTO="media_by_label_auto_mount_end"
# Trigger systemd service
ACTION=="add", TAG+="systemd", ENV{SYSTEMD_WANTS}="update-usb@%k.service"
# Exit
LABEL="media_by_label_auto_mount_end"
该服务自动挂载USB flash设备然后通知上层应用
[Unit]
Description=usb media RAUC service
After=multi-user.target
Requires=rauc.service
[Service]
Type=oneshot
Environment=DBUS_SESSION_BUS_ADDRESS=unix:path=/run/dbus/system_bus_socket
ExecStartPre=/bin/mkdir -p /media/%I
ExecStartPre=/bin/mount -t auto /dev/%I /media/%I
ExecStart=/usr/bin/update_usb.sh %I
ExecStop=/bin/umount -l /media/%i
ExecStopPost=-/bin/rmdir /media/%I
在参考实现中,我们使用了shell脚本来简单实现应用逻辑
#!/bin/sh
MOUNT=/media/$1
NUMRAUCM=$(find ${MOUNT}/*.raucb -maxdepth 0 | wc -l)
[ "$NUMRAUCM" -eq 0 ] && echo "${MOUNT}*.raucb not found" && exit
[ "$NUMRAUCM" -ne 1 ] && echo "more than one ${MOUNT}/*.raucb" && exit
rauc install $MOUNT/*.raucb
if [ "$?" -ne 0 ]; then
echo "Failed to install RAUC bundle."
else
echo "Update successful."
fi
exit $?
升级逻辑可以用 systemd D-Bus API 集成到应用中,无需使用命令行接口调用RAUC。
小技巧
RAUC 支持 D-Bus API 接口 (详见 https://rauc.readthedocs.io/en/latest/using.html#using-the-d-bus-api).
8.2. 安全措施:降级屏障
在第二个参考示例中,我们将会实现一个安全机制:降级屏障。当你在系统中检测到安全漏洞时,您将会修复并升级系统。这样带有新软件的系统又重新变为安全系统。如果黑客拥有旧软件的升级包,并且它有有效签名,他们仍然可能会安装旧的软件包,然后利用之前已经被修复的安全漏洞。为了防止这样的事情发生,您可以在每次升级时吊销旧的升级证书,然后创建一个新的证书。依赖于具体的环境,这种方式可能有点不容易实现。更简单的方式是用版本检测的方式只允许单向升级。
#!/bin/sh
VERSION_FILE=/etc/rauc/downgrade_barrier_version
MANIFEST_FILE=${RAUC_UPDATE_SOURCE}/manifest.raucm
[ ! -f ${VERSION_FILE} ] && exit 1
[ ! -f ${MANIFEST_FILE} ] && exit 2
VERSION=`cat ${VERSION_FILE} | cut -d 'r' -f 2`
BUNDLE_VERSION=`grep "version" -rI ${MANIFEST_FILE} | cut -d 'r' -f 3`
# check from empty or unset variables
[ -z "${VERSION}" ] && exit 3
[ -z "${BUNDLE_VERSION}" ] && exit 4
# developer mode, allow all updates if version is r0
#[ ${VERSION} -eq 0 ] && exit 0
# downgrade barrier
if [ ${VERSION} -gt ${BUNDLE_VERSION} ]; then
echo "Downgrade barrier blocked rauc update! CODE5\n"
else
exit 0
fi
exit 5
该脚本被安装在目标设备上,但是功能并没有被激活。您需要将脚本中 developer mode 的代码行去掉来激活降级屏障
8.3. 通过HTTP流传输升级包
将升级包放置到设备上,除了简单拷贝的方式,还可以利用HTTP的流传输,这种方法的优势在于不需要目标设备上的本地存储空间。一种简单的实现方式是在Docker 容器中运行NGINX服务。下面的例子展示了如何通过使能HTTP Range Request特性来实现一个最小下载服务器。
创建一个有下列内容的Dockerfile
FROM nginx
COPY bundles /bundles
COPY nginx.conf /etc/nginx/nginx.conf
配置NGINX,使能HTTP range request,并且将它指向升级文件。
events {}
http {
server {
proxy_force_ranges on;
location / {
root /bundles;
}
}
}
将升级包放置在 bundles 子目录。在创建所有配置文件后,文件夹结构如下:
user@host:rauc-bundle-streaming$ find
.
./bundles
./bundles/phytec-headless-bundle-phyboard-polis-imx8mn-1.raucb
./nginx.conf
./Dockerfile
在主机系统上编译并且运行docker 容器:
host:~$ sudo docker build -t rauc-bundle-streaming .
host:~$ sudo docker run --name bundles -p 80:80 -d rauc-bundle-streaming
在当前非活跃分区上安装升级包:
target:~$ rauc install http://192.168.3.10/phytec-headless-bundle-phyboard-polis-imx8mn-1.raucb
备注
升级完成后,设备可能会显示如下错误,但是对升级结果无影响:
[ 7416.336609] block nbd0: NBD_DISCONNECT
[ 7416.340413] block nbd0: Send disconnect failed -32
8.4. 自适应升级和HTTP流媒体传输
RAUC支持只升级新旧版本之间的差异化部分。这在其他升级客户端中通常被称为"增量更新"。然而对于RAUC来说,这一过程无需依赖任何中间版本即可完成,RAUC会从新的升级包中自动选择所需数据并完成升级。这一特性可以看出,RAUC的"自适应升级" 与传统的"增量更新"是有明显区别的。更多"自适应升级"的信息请查阅RAUC官方文档:https://rauc.readthedocs.io/en/latest/advanced.html#adaptive-updates
默认情况下,PHYTEC distro ampliphy-rauc 和 ampliphy-vendor-rauc 构建的镜像和升级包均支持RAUC自适应升级。
Together with 通过HTTP流传输升级包, adaptive updates allow for only downloading necessary data needed for an update. See the following link for the official RAUC documentation: https://rauc.readthedocs.io/en/latest/advanced.html#http-streaming
9. 参考
9.1. 启动逻辑实现
小技巧
本章中描述的实现细节仅作参考。支持RAUC的PHYTEC BSP默认包含这些实现,并且稍作改动。
9.1.1. U-Boot 环境变量
对U-Boot来说,选择正确启动分区的启动逻辑是在其环境中实现的。作为参考,下面这些是U-Boot环境变量中和RAUC A/B双备份系统相关性最强的变量:
变量名称 |
功能 |
|---|---|
BOOT_ORDER |
包含以空格分隔的按启动优先级排列的启动设备列表。该参数由RAUC自动设置。 |
BOOT_<slot>_LEFT |
包含每个slot的剩余可尝试启动次数。该参数被RAUC自动设置 |
|
包含设置分区的启动逻辑,以加载正确的系统 |
|
如果设置为1,则使能启动A/B 系统,如果设置为0则相反。 |
|
设置Kernel 启动参数,例如控制台,根文件系统,RAUC slot |
|
设置设备的根文件系统分区 |
|
设置设备的启动分区 |
这些环境变量在U-boot代码 include/env/phytec/rauc.env 中定义
备注
分区布局的改变,例如:当需要使用一个额外的数据分区时,可能需要修改变量 raucrootpart and raucbootpart 。在您修改变量后,请确保使用新的bootloader环境重编译镜像。
9.1.2. Barebox Bootchooser 框架
对barebox来说,它使用bootchooser和state框架来实现选择正确镜像的启动逻辑。查阅barebox文档以获取详细信息: Barebox Bootchooser Framework, Barebox State Framework.
First, the state framework configuration needs to be added to the barebox device tree. Check out the 自定义BSP chapter in the Yocto reference manual. The state framework configuration is already included with our BSP for the supported SoC and can be directly included in the main barebox device tree. E.g. for i.MX6 based module:
#include "imx6qdl-phytec-state.dtsi"
之后重编译镜像,并且烧写新的bootloader。
警告
注意,添加state 框架之后,EEPROM起始的160字节被占用,不可以被用户用于其他用途
下面的设备树片段展示了BSP中使用的state 框架配置示例。可以看到,EEPROM用于存储state信息。
/ {
aliases {
state = &state;
};
state: imx6qdl_phytec_boot_state {
magic = <0x883b86a6>;
compatible = "barebox,state";
backend-type = "raw";
backend = <&backend_update_eeprom>;
backend-stridesize = <54>;
#address-cells = <1>;
#size-cells = <1>;
bootstate {
#address-cells = <1>;
#size-cells = <1>;
last_chosen {
reg = <0x0 0x4>;
type = "uint32";
};
system0 {
#address-cells = <1>;
#size-cells = <1>;
remaining_attempts {
reg = <0x4 0x4>;
type = "uint32";
default = <3>;
};
priority {
reg = <0x8 0x4>;
type = "uint32";
default = <21>;
};
ok {
reg = <0xc 0x4>;
type = "uint32";
default = <0>;
};
};
system1 {
#address-cells = <1>;
#size-cells = <1>;
remaining_attempts {
reg = <0x10 0x4>;
type = "uint32";
default = <3>;
};
priority {
reg = <0x14 0x4>;
type = "uint32";
default = <20>;
};
ok {
reg = <0x18 0x4>;
type = "uint32";
default = <0>;
};
};
};
};
};
&eeprom {
status = "okay";
partitions {
compatible = "fixed-partitions";
#size-cells = <1>;
#address-cells = <1>;
backend_update_eeprom: state@0 {
reg = <0x0 0x100>;
label = "update-eeprom";
};
};
};
要从两个系统中选择一个来启动,bootchooser需要了解state框架配置。对于每个系统,我们都需要一个启动脚本。对于NAND flash系统,第一个系统的启动脚本会类似如下:
#!/bin/sh
[ -e /env/config-expansions ] && /env/config-expansions
[ ! -e /dev/nand0.root.ubi ] && ubiattach /dev/nand0.root
global.bootm.image="/dev/nand0.root.ubi.kernel0"
global.bootm.oftree="/dev/nand0.root.ubi.oftree0"
global.linux.bootargs.dyn.root="root=ubi0:root0 ubi.mtd=root rootfstype=ubifs"
第二个启动脚本和第一个结构相同,但是使用包含第二个系统的分区。配备eMMC flash的Machine使用相似的启动脚本,但是挂载和启动参数会有差异。
运行下面的命令创建必需的bootchooser非易失性环境变量:
barebox$ nv bootchooser.state_prefix=state.bootstate
barebox$ nv bootchooser.system0.boot=system0
barebox$ nv bootchooser.system1.boot=system1
barebox$ nv bootchooser.targets="system0 system1"
9.2. eMMC Boot 分区
使用eMMC flash存储,我们可以使用Boot分区来实现备份bootloader
默认情况下,使用我们的BSP编译出的升级包(例如 phytec-headless-bundle)包含用于升级eMMC boot 分区的bootloader
注意,U-boot环境变量仍然存放在第一个分区前的user 区域。user区域也包含镜像初始化过程中首次加载的bootloader。
要手动将bootloader写入到eMMC boot分区,首先关闭写保护:
target:~$ echo 0 > /sys/block/mmcblk2boot0/force_ro
target:~$ echo 0 > /sys/block/mmcblk2boot1/force_ro
将bootloader写入到eMMC boot分区:
target:~$ dd if=imx-boot of=/dev/mmcblk2boot0 bs=1k seek=33
target:~$ dd if=imx-boot of=/dev/mmcblk2boot1 bs=1k seek=33
该示例针对i.MX 8M Mini SoC。注意,其他SoC可能会有不同的bootloader文件以及不同的bootloader加载偏移值。该偏移值通过seek参数给定。查看下表获取不同SoC所要求的偏移值:
SoC |
User 区域偏移值 |
Boot 分区偏移值 |
eMMC 设备 |
Bootloader |
|---|---|---|---|---|
i.MX 6 |
1 kiB |
0 kiB |
/dev/mmcblk3 |
barebox.bin |
i.MX 6UL |
1 kiB |
0 kiB |
/dev/mmcblk1 |
barebox.bin |
i.MX 8M |
33 kiB |
33 kiB |
/dev/mmcblk0 |
imx-boot |
i.MX 8M Mini |
33 kiB |
33 kiB |
/dev/mmcblk2 |
imx-boot |
i.MX 8M Nano |
32 kiB |
0 kiB |
/dev/mmcblk2 |
imx-boot |
i.MX 8M Plus |
32 kiB |
0 kiB |
/dev/mmcblk2 |
imx-boot |
i.MX 93 |
32 kiB |
0 kiB |
/dev/mmcblk0 |
imx-boot |
AM62x AM62Ax AM64x |
N/A |
0 kiB 512 kiB 2560 kiB |
/dev/mmcblk0 |
tiboot3.bin tispl.bin u-boot.img |
9.2.1. Bootloader 偏移
注意,即使是同一SoC,偏移值也会随bootloader烧写位置在user区域还是boot分区而不同。
在bootloader写入eMMC boot分区后,从boot分区启动需要使用以下命令使能:
target:~$ mmc bootpart enable 1 0 /dev/mmcblk2
这也意味着只有写到eMMC boot分区的bootloader才会被使用。user 区域的bootloader不再被使用。在使用升级包升级目标系统时,这些步骤也会在RAUC内部逻辑中执行。
要关闭从eMMC boot分区启动,只要输入下面的命令:
target:~$ mmc bootpart enable 0 0 /dev/mmcblk2
此命令执行后,eMMC user分区提供系统的bootloader
使用U-Boot时,在bootloader中也可以使用相似的命令:
u-boot=> mmc partconf 2 0 0 0 # disable
u-boot=> mmc partconf 2 0 1 0 # enable